
查兰比姆拉
机电工程师
EZAVE
研究现代运动和其他工业应用的工程师和设计师, 关键是要理解继子机和刷子机的优缺点并比较两种设备并观察每个电机加速度和噪声方面各种加载条件实验显示功率、效率与温度变化

stepper电机
最常用继子电机混合式继子电机,由永久磁转子电磁电磁电磁电磁标组成鼠标有两个带永久磁铁的杯子:一个带北极,第二个带南极
简化继机转子由两杯永久磁铁组成每一杯三牙并带磁极在这种情况下,这些杯子组装成半路半路半路(60度)台阶由四极组成并分二步绕行


steppers电子通勤双极继子驱动程序使用双H桥路以按序激活电阶极,使转子轮转阶角转转转阶梯角可用方程(1)计算 :
步进安卓 = 360/2xn_ROTORTETETH/n_PHASE
转子旋转30摄氏度-这个继子机被称为12步步电机全步操作期间,变值序列和转子位置依次于特定序列多数继子电机有50或100对电极,200或400全步实现完全转子革命令阶角小到1.8度或0.9度
带高级步进电机驱动器的小步角可以通过执行微步操作进一步划分为小角阶梯角可半步跨四分位并达1/256步stepper电机提供高定位精度 因为它们能跨出小角
无刷dc电机
无刷dc电机有永久磁转子电磁电磁标并需要电子转换无刷dc马达需要转子瞬时位置响应此需求 声效传感器使用 实现轮子角位置信息输入微控制器使用三相逆向电路切换相向流dc输入电压转换为三相电压以相继激活电流极
轮子磁场总追逐电压磁场,结果产生BLDC电机旋转18luck平台简化电机单极BLDC,BLDC陷阱分解变换和转子位置典型陷阱变换令电机易受托盘波其结果是,BLDC测试使用高级切换面向现场控制FOC提供最小托盘波纹平滑电机运算
实验搭建
步进电机测试
搭建继机测试时使用NEMA23双极继机与磁粒制动模拟电机测试需要五大组件说明如下:
- 编码器(安装在粒子刹车的另一端)监控轴旋转速度
- 双极继波电机驱动器控制继波电机-并用输入器、内部流感知器和调控器-
- 24Vdc轮廓提供数组电流测量dc电流图在不同加载条件下24Vdsteps提供电源
- 运动驱动器运动LAB与串行外围界面兼容,配置阶乘运动驱动参数,如步态模式、定值电流和附加电机设置
- 函数生成器向驱动器发送平方脉冲,驱动器向前驱动

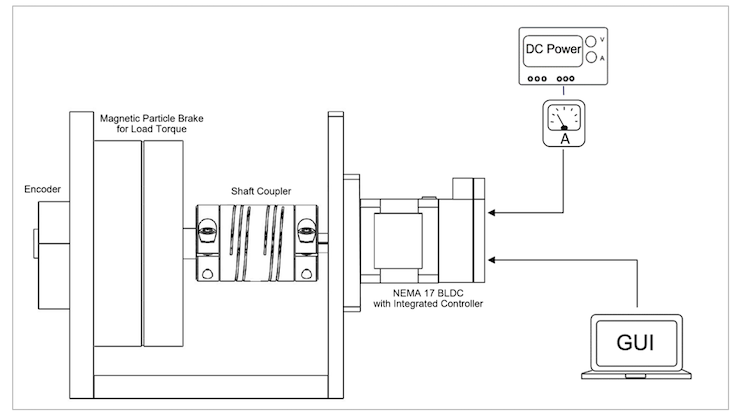
无刷dc马达测试
无刷dc电机测试搭建包括磁粒模拟和NEMA 17BLDC机集成控制器
24Vdklipse数组使用流表测量无刷dc电机在不同加载条件中的dc电流图运动LABGUI可用速度控制模式驱动BLDC测试
当前绘图比较
步进器通常在恒定电流下操作,或称常态电波强制继子总画最大流 不论电机轴负载取步器可提供低速最大托盘但也会导致大量耗用热量
在这次实验中,继子机用三种微步解析法测试:半步制、四步制和第八步制dc电流抽取记录在三种不同加载条件下各种电机速度(无负载,8.2N-cm和11.5N-cm)。实验结果显示继子机测量dc电流比BLDC电流低效率
无卸电流图还测量无刷dc电机、半步步电机、四步电机和八步电机18luck平台继子机绘制比BLDC高得多零速流,即使没有机械操作跨低速范围继波电流图高居不下电流速度提高高速范围后 继器电流图开始下降
接下去测量当前抽取量BLDC电机、半步踏马机、四步踏马机和八步踏手继子电机高速悬停 因为它们通风流少微步提高电机定位分辨率 并减少输出托盘八步四步电机中速停顿同时,BLDC电机只绘制它需要的东西视井负载而定
无载条件下BLDC绘制小流旋转转子同时,加载轴时当前拉动量增加,使BLDC电机继续以比继器电机更高速度旋转BLDC电机比继器电机更有电效,
功率密度比较
电密度度量运动输出量单位体积无刷dc电机通常比继器电机高功率密度
使用这些维度,卷数估计为73cm3BLDC电机和131cm3取步器电机电机输出电量等于输出速度乘输出托盘BLDC电机继续以更高速度旋转,比步器电机在相同加载条件下旋转,这意味着BLDC电机提供更高电密度,因为电量输出比小电密度在空间有限和高功率需求应用中发挥重要作用,如无人机和四叉式机
温度上升比较
前文讨论过,继子电机恒定电流主要以热形式导致通风中重大能量损耗实验期间,电机体温度测量环境温度为22摄氏度
继子机温度稳定上升 不论轴负载无刷dc电机不抽取过流表示体温最小增18luck平台不同于步进电机,BLDC转换高百分比输入电量为机械电量而非热量

加速噪声比较
高极计取直接负责比BLDC高定位精度高极计数还导致操作期间有限加速和高声噪声加速步进电机可能比较困难,因为它需要逐步加速电路以保持轴角方位精度如果继子快速加速,它就会冒缺阶梯风险,这在许多应用中可能引起问题此外,如果输入流低加高加速需求,继器可能停顿
噪声方面, 无刷dc和继器电机可检测到一种特殊托盘,或称cogging托盘,它引起振动并按步旋转BLDC流取量与轴负载量成比例,BLDCs可提取加速马达定值速度范围内负载所需的额外流BLDCs正常操作比继者宁静得多BLDC电机可靠高效解决方案提供高速高速加速和低声噪声

结论
BLDC电机定位精度与角传感器精度成比例,而带高分辨率角感应机集成BLDC电机可提供异常定位精度带微步进电机比无刷dc电机高定位精度随之而来的是从中程速度开始提供较少托盘的劣势,这导致缺步或延时步进器缺少快速加速能力 产生比BLDC更多噪声整体而言,继波电机费用较低,但仅限于低速应用BLDC电机可靠、静默化解决方案,在广速范围提供更高效率和精度
EZAVE
ezmotion.co




留答题
你一定是登录入发布注释